




Improved APF missile route planning based on circulation repulsion potential field
-
摘要:
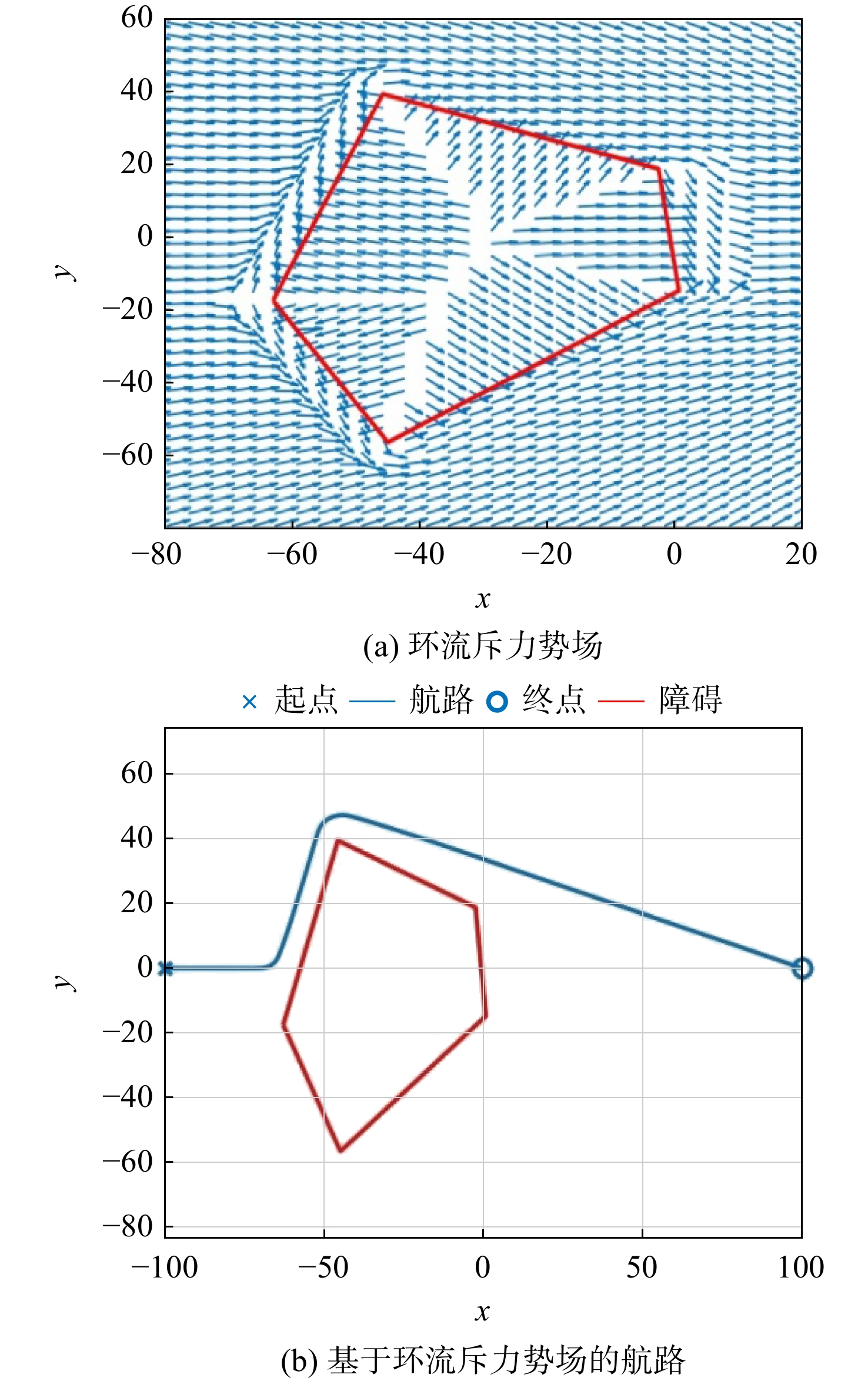
为解决人工势场(artificial potential field,APF)方法容易陷入局部最小值的问题,提出基于环流斥力势场的改进APF航路规划方法(改进APF方法),改变斥力势场方向使其变成围绕障碍物的环流,并结合导弹由航路点控制的特点,进一步由约束法和切线法得到导弹飞行航路点。在不同场景下分别采用传统APF方法与改进APF方法进行航路规划求解,以及使用切线法和约束法进行导弹航路点求解。结果表明:改进APF方法有效提高可解概率,能够在多边形障碍密集、障碍边界与导弹航向垂直的情况下得到航路。同时,相比传统APF方法,改进APF方法生成的航路较平滑。对于导弹航路点求解,切线法和约束法所得到的导弹航路航程相差不大,但约束法的解算时间较短且生成航点数量较少,而切线法的安全性能较好。
Abstract:Given the proneness of artificial potential field (APF) method to fall into the local minimum, an improved APF route planning based on circulation repulsion potential field (improved APF) method was proposed. This method changed the direction of repulsion potential field into a circulation around the obstacle. The waypoints of missile flight were obtained by constraint method and tangent method. In different scenarios, traditional APF method and improved APF method were used to solve route planning, and the tangent method and constraint method were adopted to solve the missile route point. The results showed that the improved APF method can effectively improve solvable probability, the route can be obtained under the condition of dense polygonal obstacles, and the obstacle boundary ran perpendicular to platform course. At the same time, the route generated by the improved APF method was smoother than traditional APF method. For the missile waypoint solution, there was little difference between the tangent method and the constraint method, but the constraint method had a shorter solution time and fewer waypoints, while the tangent method had better safety performance.
-
Key words:
- route planning /
- missiles /
- artificial potential field method /
- local minimum /
- waypoints
-
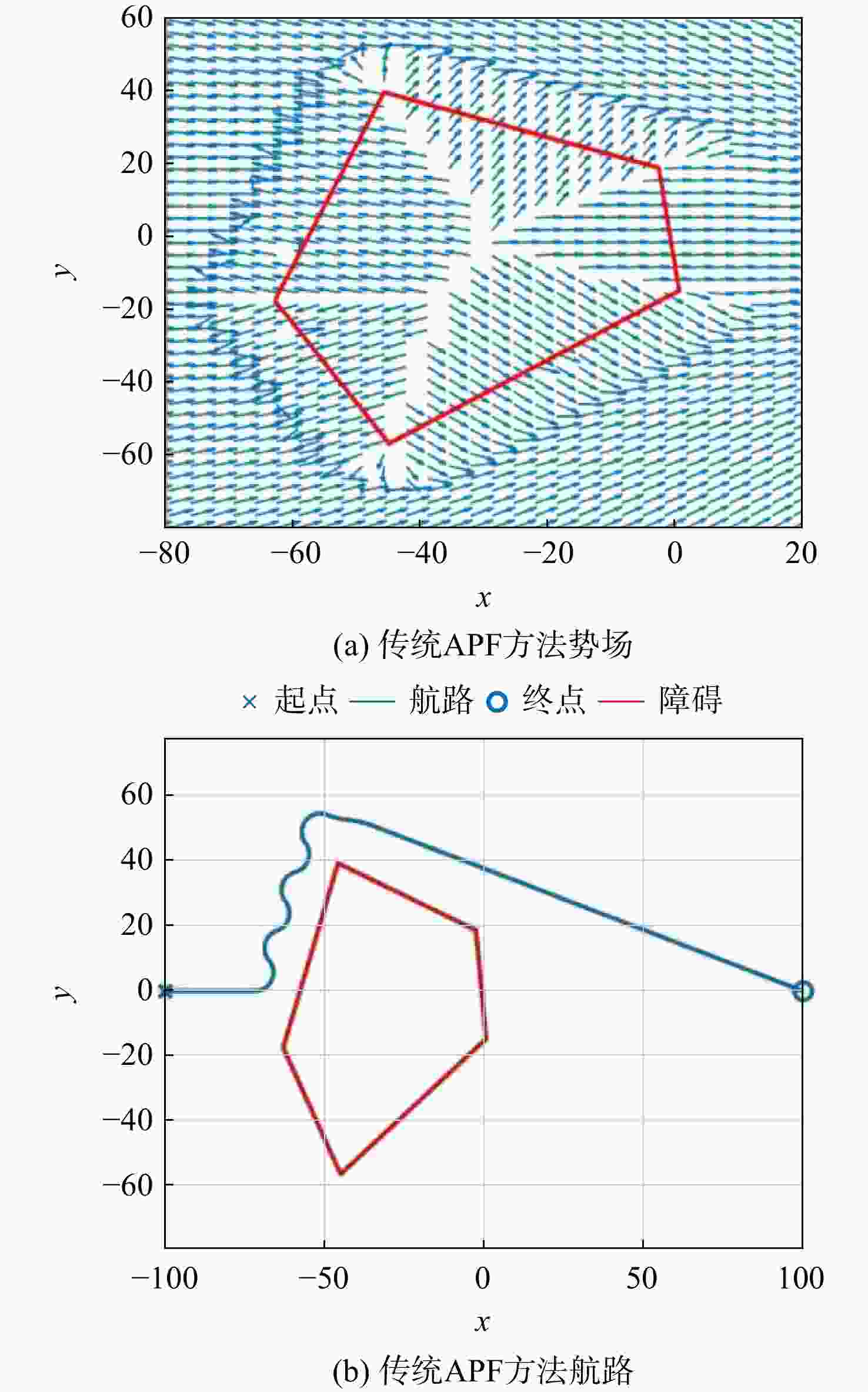
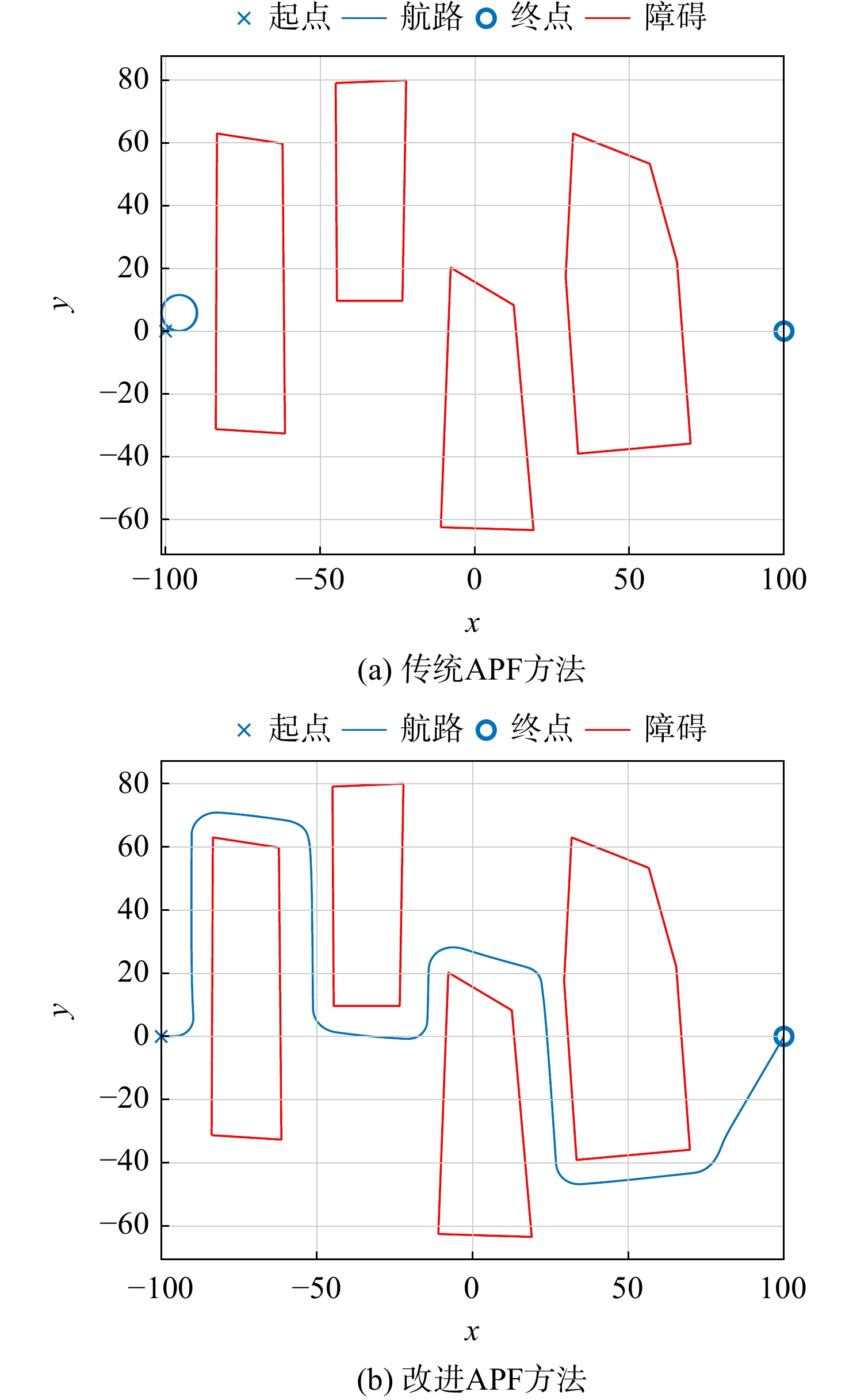
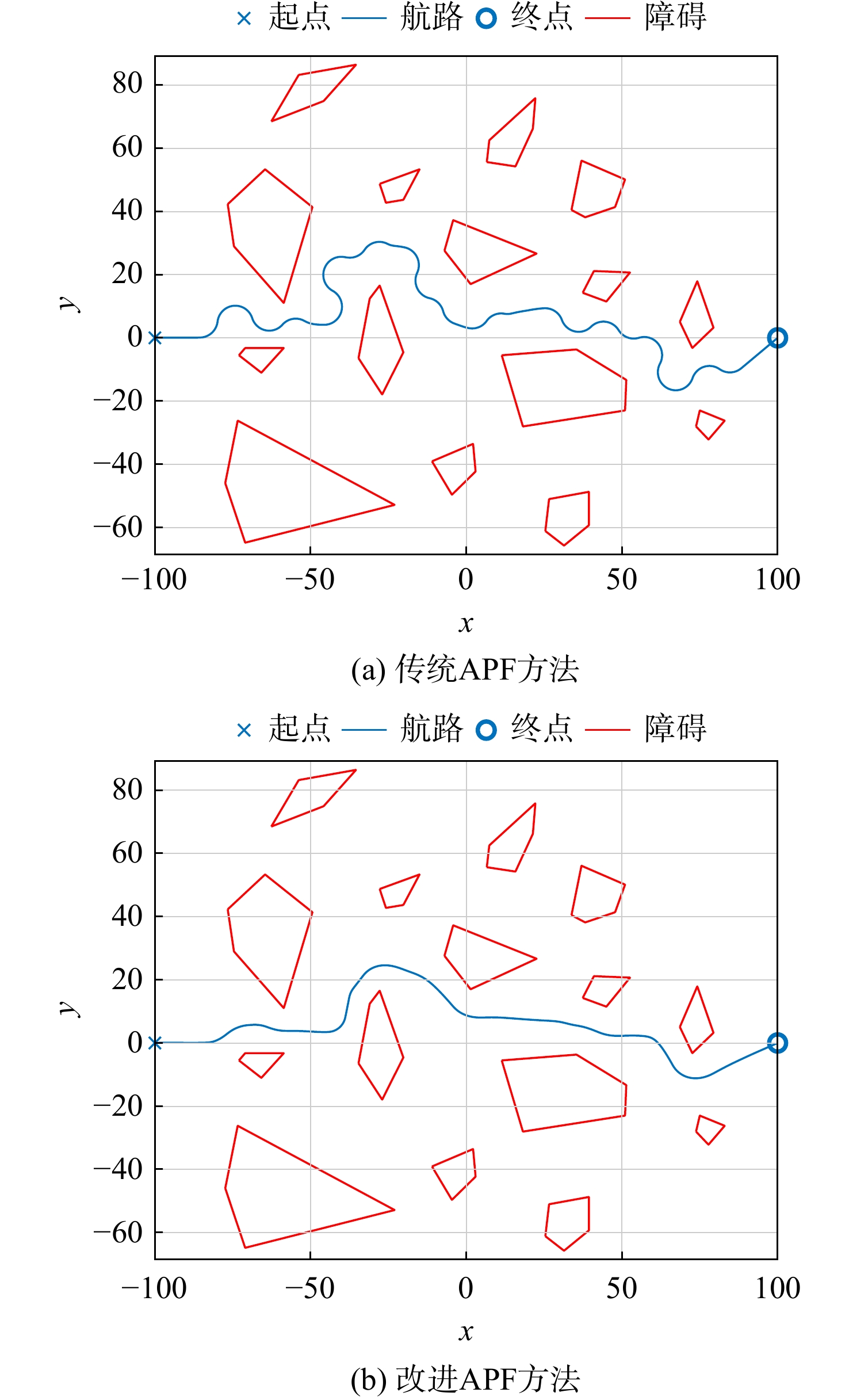
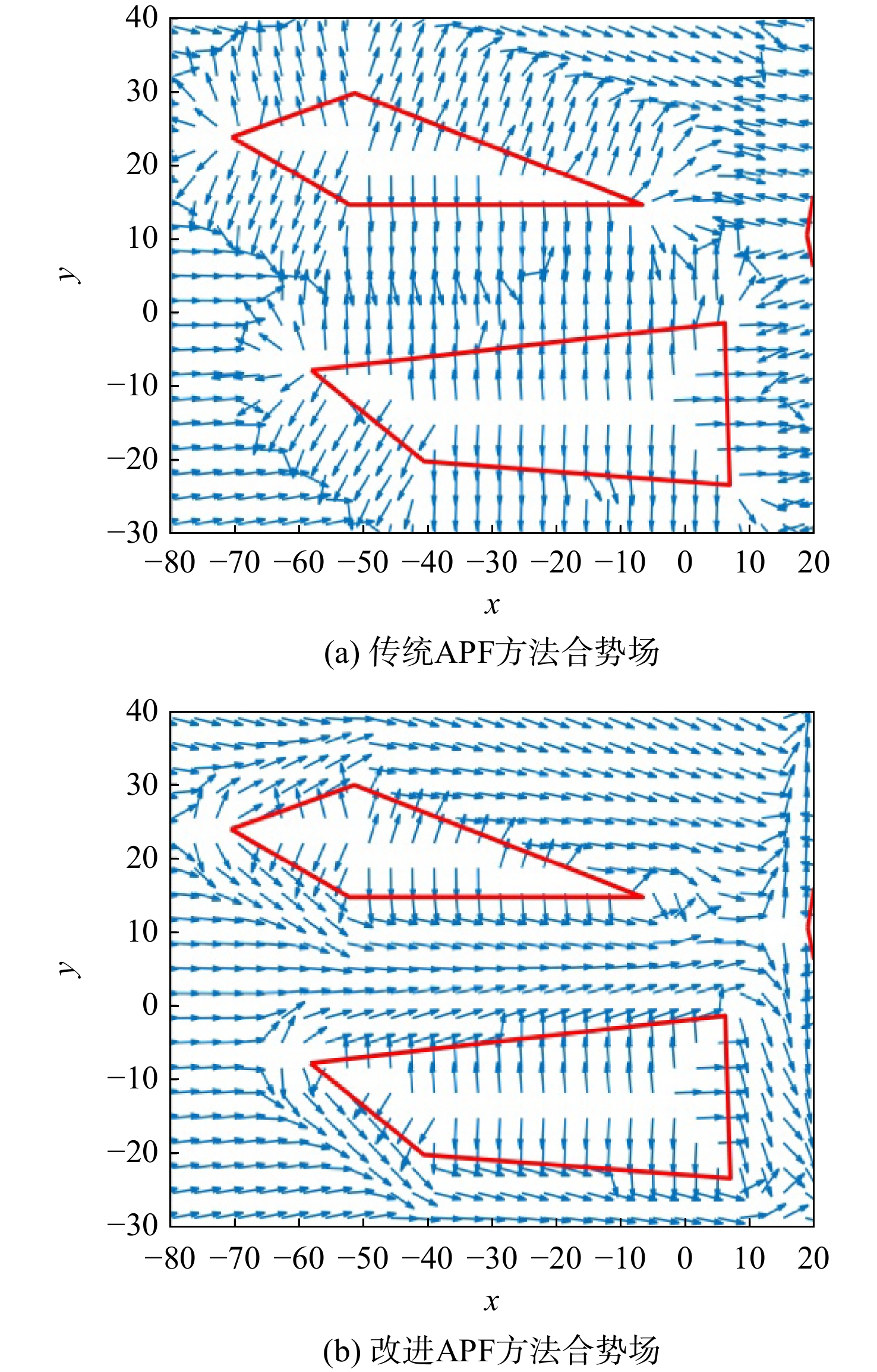
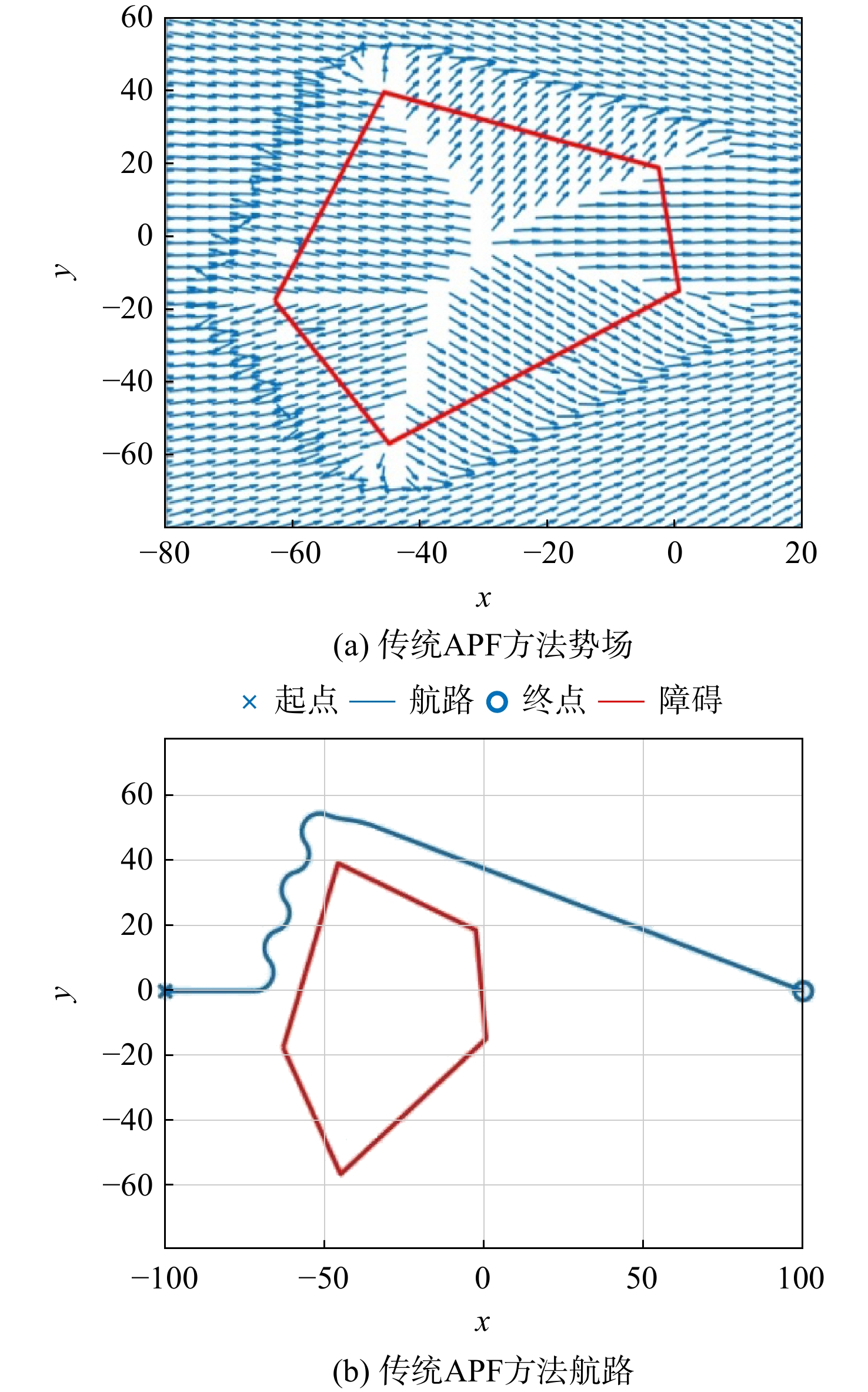
图 1 传统APF方法的势场与航路(振荡)
Figure 1. Potential field and route of traditional APF method (oscillation)

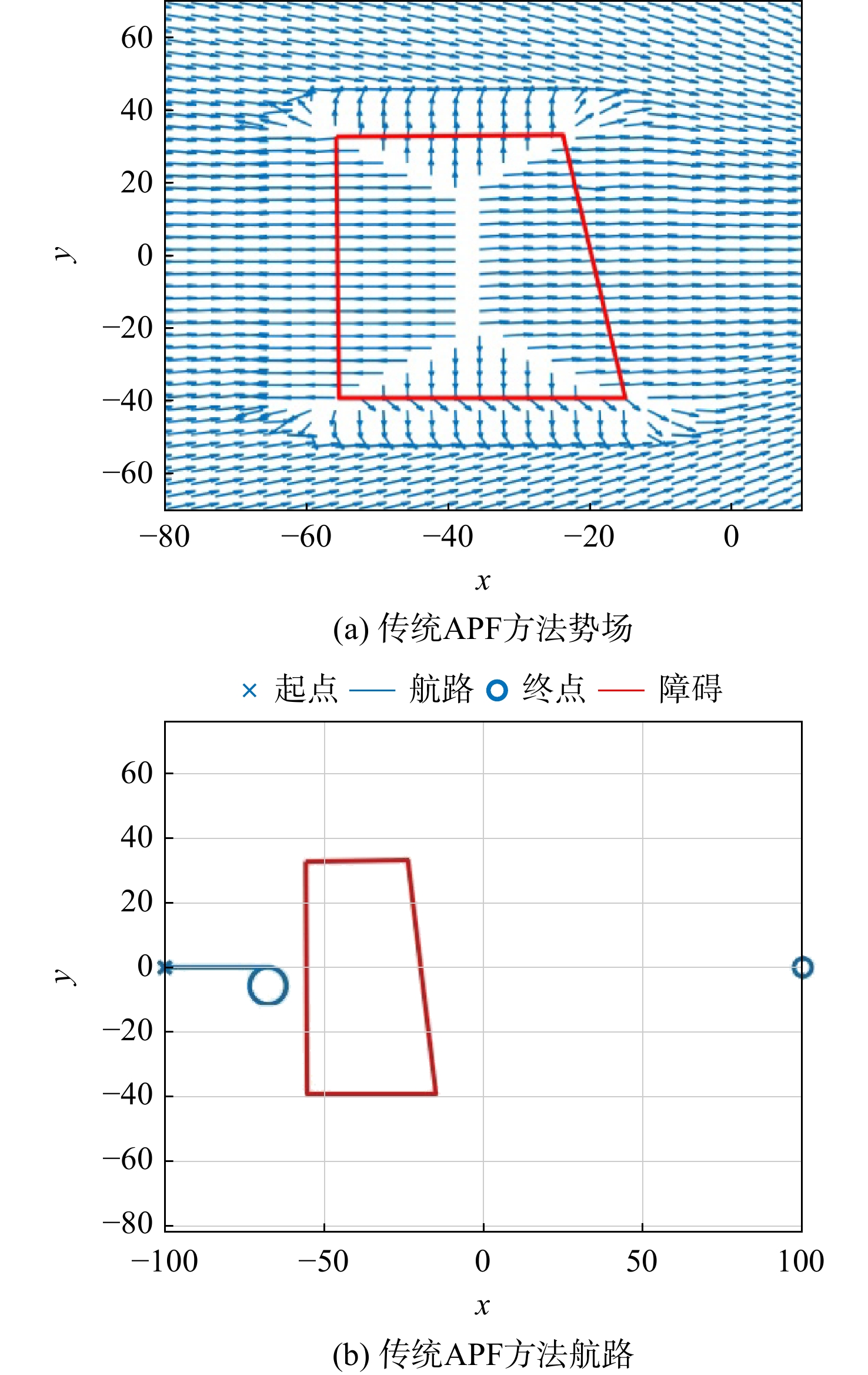
图 2 传统APF方法的势场与航路(无解)
Figure 2. Potential field and route of traditional APF method (no solution)
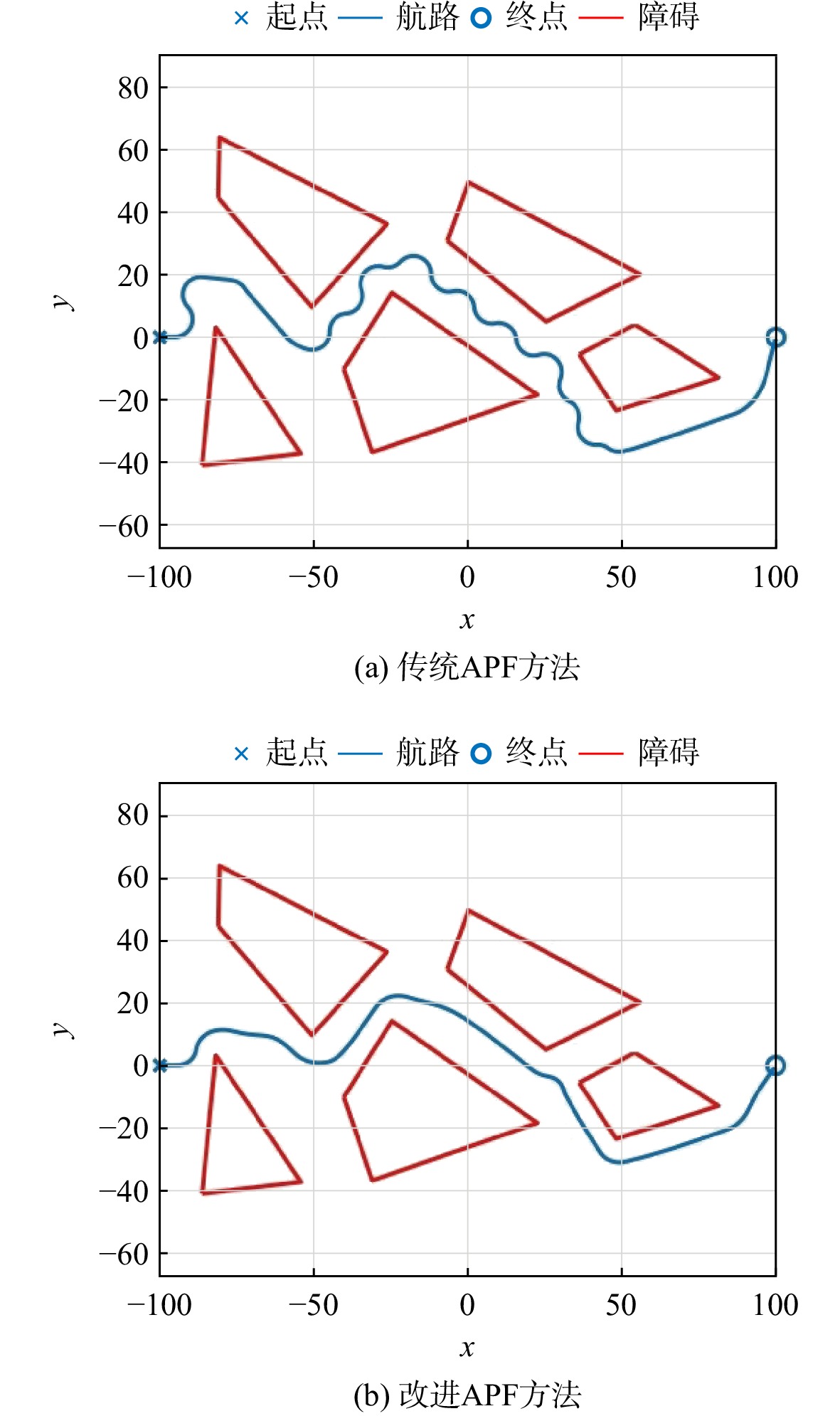
表 1 航路振荡指标对比
Table 1. Route oscillation index contrast
场景 H 传统APF方法 改进APF方法 C 29.4410 4.1008 D 34.1225 7.8445  下载: 导出CSV
下载: 导出CSV
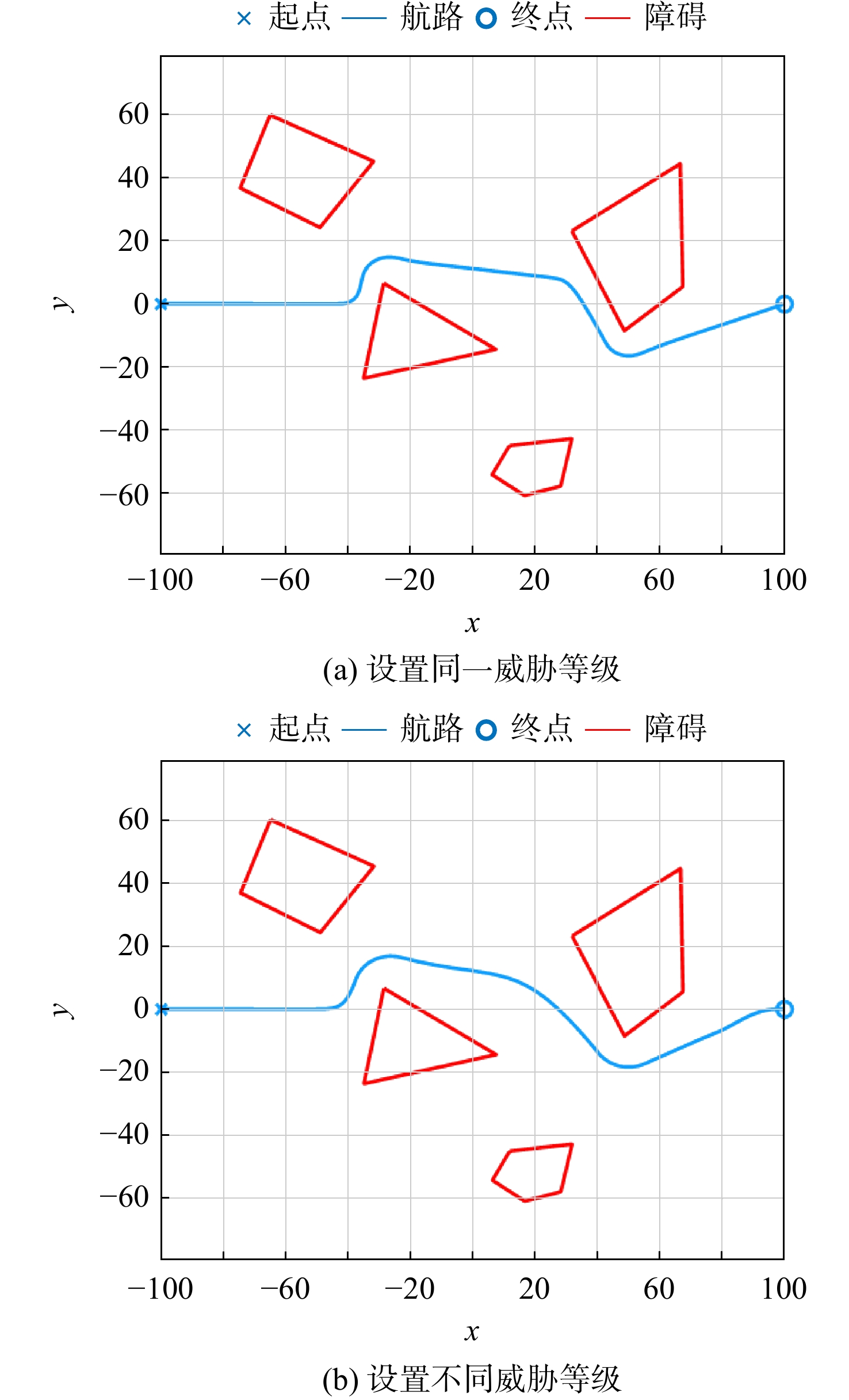
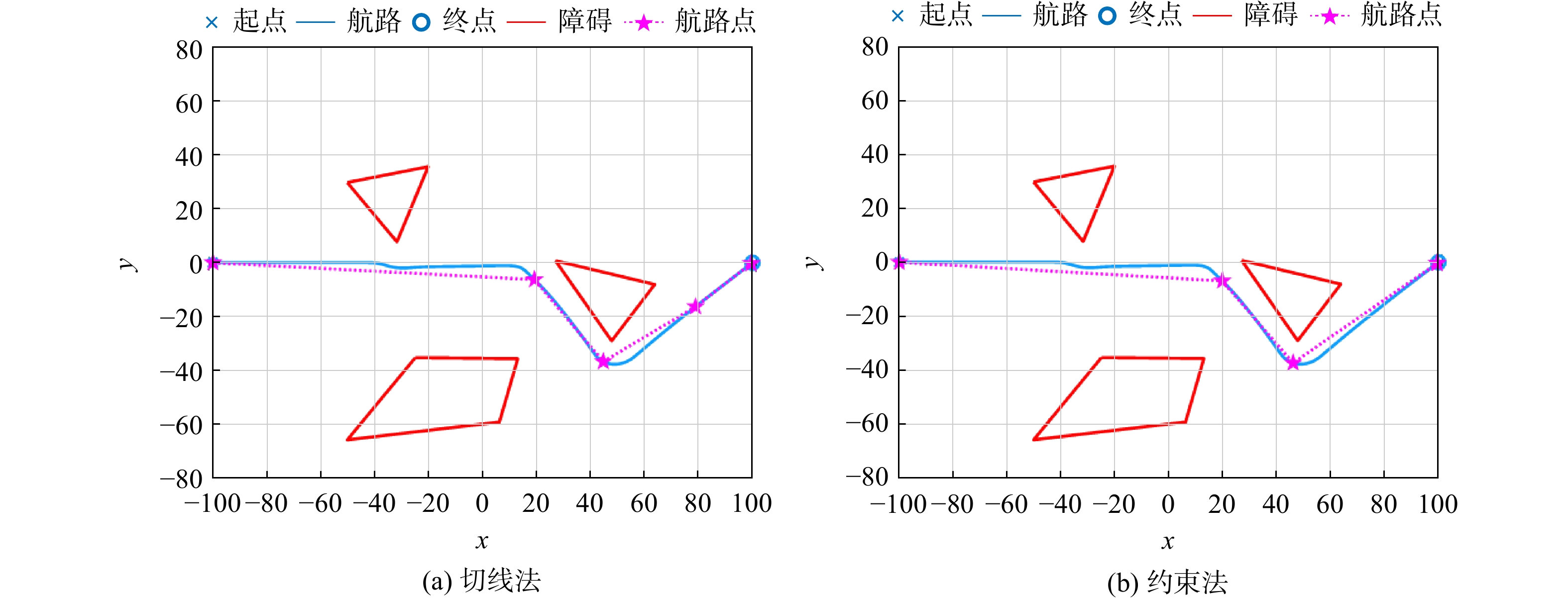
表 3 图13(a)关键航路点
Table 3. Key waypoints for Fig.13(a)
x −100 8.9661 41.4024 99.5412 y 0 −1.1006 −33.7872 −0.3534
下载: 导出CSV
表 4 图13(b)关键航路点
Table 4. Key waypoints for Fig.13(b)
x −100 19.1906 44.7047 78.9210 99.54118 y 0 −6.2876 −36.7713 −16.3532 −0.35337
下载: 导出CSV
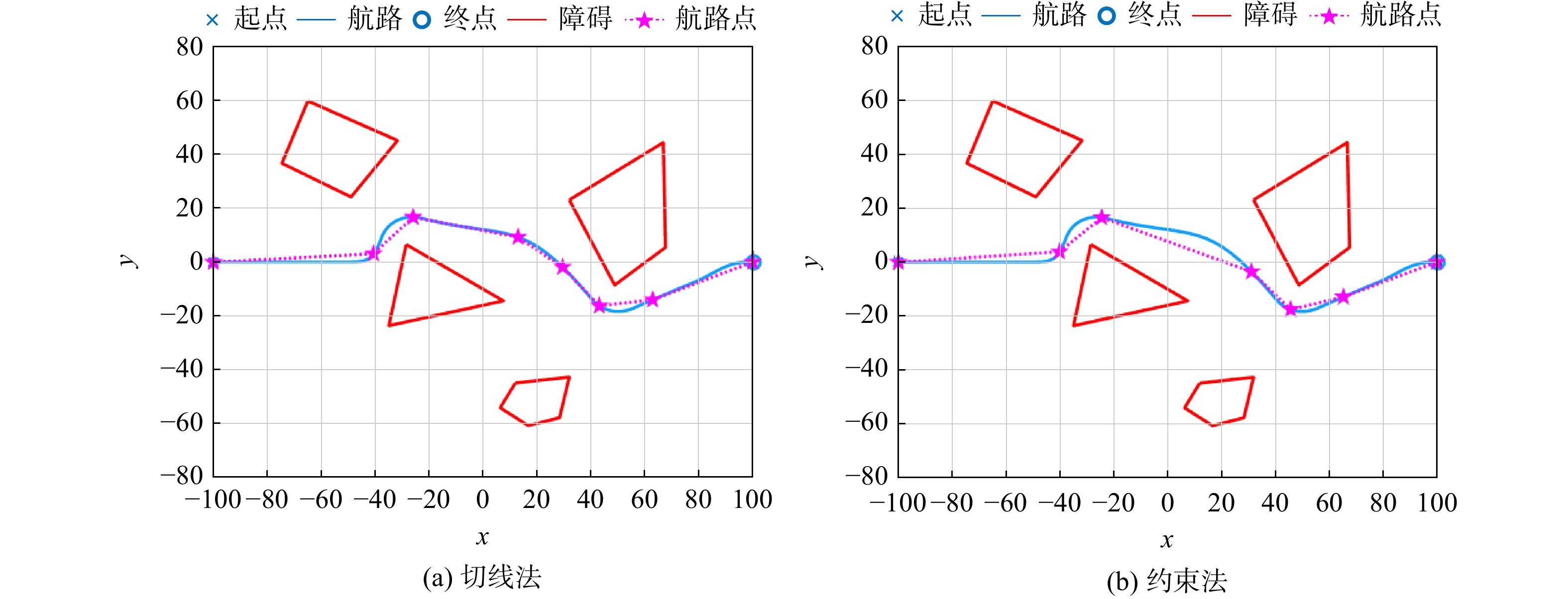
表 5 图14(a)关键航路点
Table 5. Key waypoints for Fig.14(a)
x −100 −40.6761 −26.0432 12.8005 y 0 3.1910 16.7633 9.3463 x 29.3248 42.8864 62.6602 99.64576 y −1.8098 −16.1883 −13.9404 0.082511
下载: 导出CSV
表 6 图14(b)关键航路点
Table 6. Key waypoints for Fig.14(b)
x −100 −48.4025 −34.1564 8.7776 y 0 0.0855 14.1647 10.5468 x 39.8251 77.8515 99.6458 y −13.3379 −7.5013 0.0825
下载: 导出CSV
表 7 导弹航程对比
Table 7. Missile range contrast
场景 航路距离 切线法 约束法 E 224.55194 225.22698 F 218.07200 214.71717
下载: 导出CSV
-
[1] 韩尧, 李少华. 基于改进人工势场法的无人机航迹规划[EB/OL]. [2021-10-20]. http://kns.cnki.net/kcms/detail/11.2422.TN.20210531.1117.014.html. [2] 马小陆,梅宏. 基于改进势场蚁群算法的移动机器人全局路径规划[J]. 机械工程学报,2021,57(1): 19-27. doi: 10.3901/JME.2021.01.019MA Xiaolu,MEI Hong. Mobile robot global path planning based on improved potential field ant colony algorithm[J]. Chinese Journal of Mechanical Engineering,2021,57(1): 19-27. (in Chinese) doi: 10.3901/JME.2021.01.019 [3] 王洪斌,郝策,张平,等. 基于A~*算法和人工势场法的移动机器人路径规划[J]. 中国机械工程,2019,30(20): 2489-2496. doi: 10.3969/j.issn.1004-132X.2019.20.012WANG Hongbin,HAO Ce,ZHANG Ping,et al. Mobile robot path planning based on A~* algorithm and artificial potential field method[J]. China Mechanical Engineering,2019,30(20): 2489-2496. (in Chinese) doi: 10.3969/j.issn.1004-132X.2019.20.012 [4] 张建英,赵志萍,刘暾. 基于人工势场法的机器人路径规划[J]. 哈尔滨工业大学学报,2006,38(8): 1306-1309. doi: 10.3321/j.issn:0367-6234.2006.08.026ZHANG Jianying,ZHAO Zhiping,LIU Tun. Robot path planning based on artificial potential field method[J]. Journal of Harbin Institute of Technology,2006,38(8): 1306-1309. (in Chinese) doi: 10.3321/j.issn:0367-6234.2006.08.026 [5] 张培艳,吕恬生. 基于模拟退火-人工势场法的足球机器人路径规划研究[J]. 机械科学与技术,2003,22(4): 547-548,555. doi: 10.3321/j.issn:1003-8728.2003.04.010ZHANG Peiyan,LÜ Tiansheng. Research on soccer robot path planning based on simulated annealing-artificial potential field method[J]. Mechanical Science and Technology,2003,22(4): 547-548,555. (in Chinese) doi: 10.3321/j.issn:1003-8728.2003.04.010 [6] 李晋. 改进人工势场法的移动机器人路径规划[D]. 北京: 北京交通大学, 2008.LI Jin. Improved artificial potential field method for mobile robot path planning[D]. Beijing: Beijing Jiaotong University, 2008. (in Chinese) [7] MIN C L, MIN G P. Artificial potential field based path planning for mobile robots using a virtual obstacle concept[C]//Proceedings 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003). Kobe, Japan: IEEE, 2003: 735-740. [8] CHEN Y B,LUO G C,MEI Y S,et al. UAV path planning using artificial potential field method updated by optimal control theory[J]. International Journal of Systems Science,2016,47(6): 1407-1420. doi: 10.1080/00207721.2014.929191 [9] FEDELE G,D’ALFONSO L,CHIARAVALLOTI F,et al. Obstacles avoidance based on switching potential functions[J]. Journal of Intelligent and Robotic Systems,2018,90(3): 387-405. [10] 邓叶,姜香菊. 基于改进人工势场法的四旋翼无人机航迹规划算法[J]. 传感器与微系统,2021,40(7): 130-133.DENG Ye,JIANG Xiangju. A four-rotor UAV trajectory planning algorithm based on improved artificial potential field method[J]. Sensors and Microsystems,2021,40(7): 130-133. (in Chinese) [11] 史岩,张立华,董受全,等. 基于ACO算法和Bezier曲线优化的巡航导弹航路规划[J]. 系统仿真学报,2020,32(1): 122-129. doi: 10.16182/j.issn1004731x.joss.17-9084SHI Yan,ZHANG Lihua,DONG Shouquan,et al. Cruise missile route planning based on ACO algorithm and Bezier curve optimization[J]. Journal of System Simulation,2020,32(1): 122-129. (in Chinese) doi: 10.16182/j.issn1004731x.joss.17-9084 [12] 史岩,张立华,董受全,等. 基于Voronoi图与Bezier曲线算法的反舰导弹航路规划方法[J]. 弹箭与制导学报,2018,38(5): 111-116.SHI Yan,ZHANG Lihua,DONG Shouquan,et al. Anti-ship missile route planning method based on Voronoi diagram and Bezier curve algorithm[J]. Journal of Projectiles, Rockets, Rockets and Guidance,2018,38(5): 111-116. (in Chinese) [13] 刘钢,陈国生,老松杨,等. 反舰导弹航路规划的几何学特征及规律[J]. 电光与控制,2013,20(9): 23-28. doi: 10.3969/j.issn.1671-637X.2013.09.006LIU Gang,CHEN Guosheng,LAO Songyang,et al. The geometric characteristics and laws of anti-ship missile route planning[J]. Electro-Optics and Control,2013,20(9): 23-28. (in Chinese) doi: 10.3969/j.issn.1671-637X.2013.09.006 [14] 王庆江,盛沛,彭军. 基于几何原理的反舰导弹协同攻击时航路规划方法[J]. 电光与控制,2019,26(9): 19-25. doi: 10.3969/j.issn.1671-637X.2019.09.005WANG Qingjiang,SHENG Pei,PENG Jun. Route planning method for coordinated attack of anti-ship missiles based on geometric principles[J]. Electro-Optics and Control,2019,26(9): 19-25. (in Chinese) doi: 10.3969/j.issn.1671-637X.2019.09.005 [15] 刘钢,老松杨,谭东风,等. 反舰导弹航路规划图形化快速逆推方法[J]. 弹道学报,2011,23(2): 52-56, 61.LIU Gang,LAO Songyang,TAN Dongfeng,et al. Graphical and fast backstepping method for anti-ship missile route planning[J]. Journal of Ballistics,2011,23(2): 52-56, 61. (in Chinese) [16] 杨咪,张安,毕文豪,等. 基于改进遗传算法的多弹协同攻击航路规划[J]. 兵工自动化,2020,39(2): 28-32, 40.YANG Mi,ZHANG An,BI Wenhao,et al. Multi-projectile coordinated attack route planning based on improved genetic algorithm[J]. Ordnance Industry Automation,2020,39(2): 28-32, 40. (in Chinese) [17] 孔姝睿,刘淑芬. 基于改进粒子群算法的反舰导弹航路规划研究[J]. 测控技术,2017,36(11): 66-69. doi: 10.3969/j.issn.1000-8829.2017.11.015KONG Shurui,LIU Shufen. Research on anti-ship missile route planning based on improved particle swarm algorithm[J]. Measurement and Control Technology,2017,36(11): 66-69. (in Chinese) doi: 10.3969/j.issn.1000-8829.2017.11.015 [18] 李红亮,宋贵宝,刘铁. 基于自适应A~*算法和改进遗传算法的反舰导弹航路规划[J]. 弹箭与制导学报,2013,33(2): 7-11, 18. doi: 10.3969/j.issn.1673-9728.2013.02.003LI Hongliang,SONG Guibao,LIU Tie. Anti-ship missile route planning based on adaptive A~* algorithm and improved genetic algorithm[J]. Journal of Projectiles, Rockets, Rockets and Guidance,2013,33(2): 7-11, 18. (in Chinese) doi: 10.3969/j.issn.1673-9728.2013.02.003 [19] 刘钢,老松杨,侯绿林,等. 约束引导的反舰导弹航路规划遗传算法[J]. 弹道学报,2012,24(4): 11-17. doi: 10.3969/j.issn.1004-499X.2012.04.003LIU Gang,LAO Songyang,HOU Lülin,et al. Anti-ship missile route planning genetic algorithm guided by constraints[J]. Journal of Ballistics,2012,24(4): 11-17. (in Chinese) doi: 10.3969/j.issn.1004-499X.2012.04.003 [20] 罗木生,吴铭,王培源. 反舰导弹“双一”攻击最大攻击角计算方法[J]. 火力与指挥控制,2020,45(2): 141-144, 149. doi: 10.3969/j.issn.1002-0640.2020.02.028LUO Musheng,WU Ming,WANG Peiyuan. Calculation method of the maximum attack angle of anti-ship missile “double one” attack[J]. Firepower and Command Control,2020,45(2): 141-144, 149. (in Chinese) doi: 10.3969/j.issn.1002-0640.2020.02.028 [21] 贾正荣,王航宇,卢发兴. 基于障碍凸化的改进环流APF路径规划[J]. 航空学报,2019,40(10): 254-268.JIA Zhengrong,WANG Hangyu,LU Faxing. Improved circulation APF path planning based on obstacle convexity[J]. Acta Aeronautica Sinica,2019,40(10): 254-268. (in Chinese) [22] 贾正荣,卢发兴,王航宇. 基于解耦优化和环流APF的多平台协同攻击任务规划[J]. 北京航空航天大学学报,2020,46(6): 1142-1150.JIA Zhengrong,LU Faxing,WANG Hangyu. Multi-platform cooperative attack mission planning based on decoupling optimization and circulation APF[J]. Journal of Beijing University of Aeronautics and Astronautics,2020,46(6): 1142-1150. (in Chinese) [23] 贾正荣,卢发兴,王航宇. 多平台协同突防航路规划[J]. 弹道学报,2019,31(4): 57-62.JIA Zhengrong,LU Faxing,WANG Hangyu. Multi-platform coordinated penetration route planning[J]. Journal of Ballistics,2019,31(4): 57-62. (in Chinese) -

 点击查看大图
点击查看大图
计量
- 文章访问数: 449
- HTML浏览量: 260
- PDF量: 154
- 被引次数: 0