




Multiple-model self-calibration extended Kalman filter method
-
摘要:
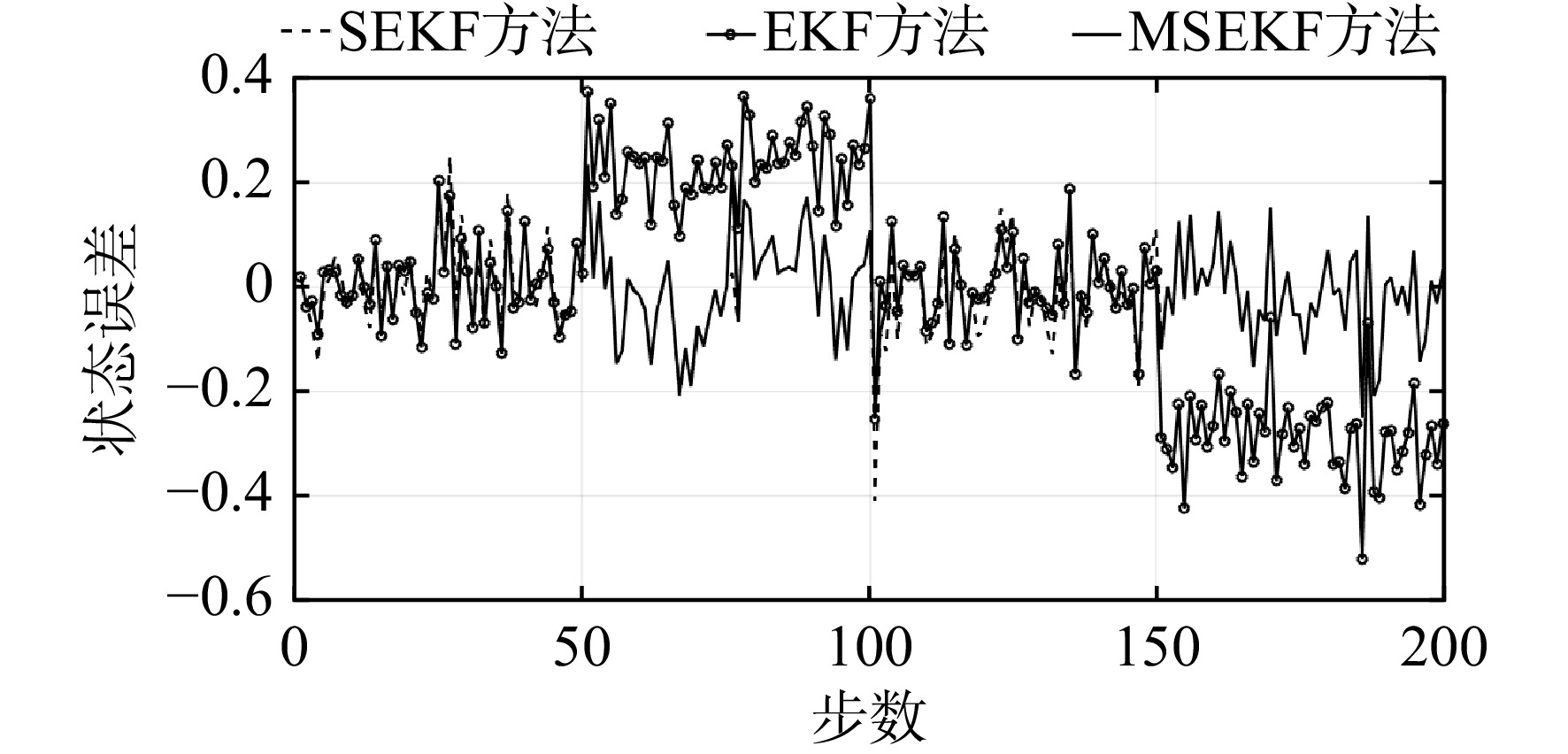
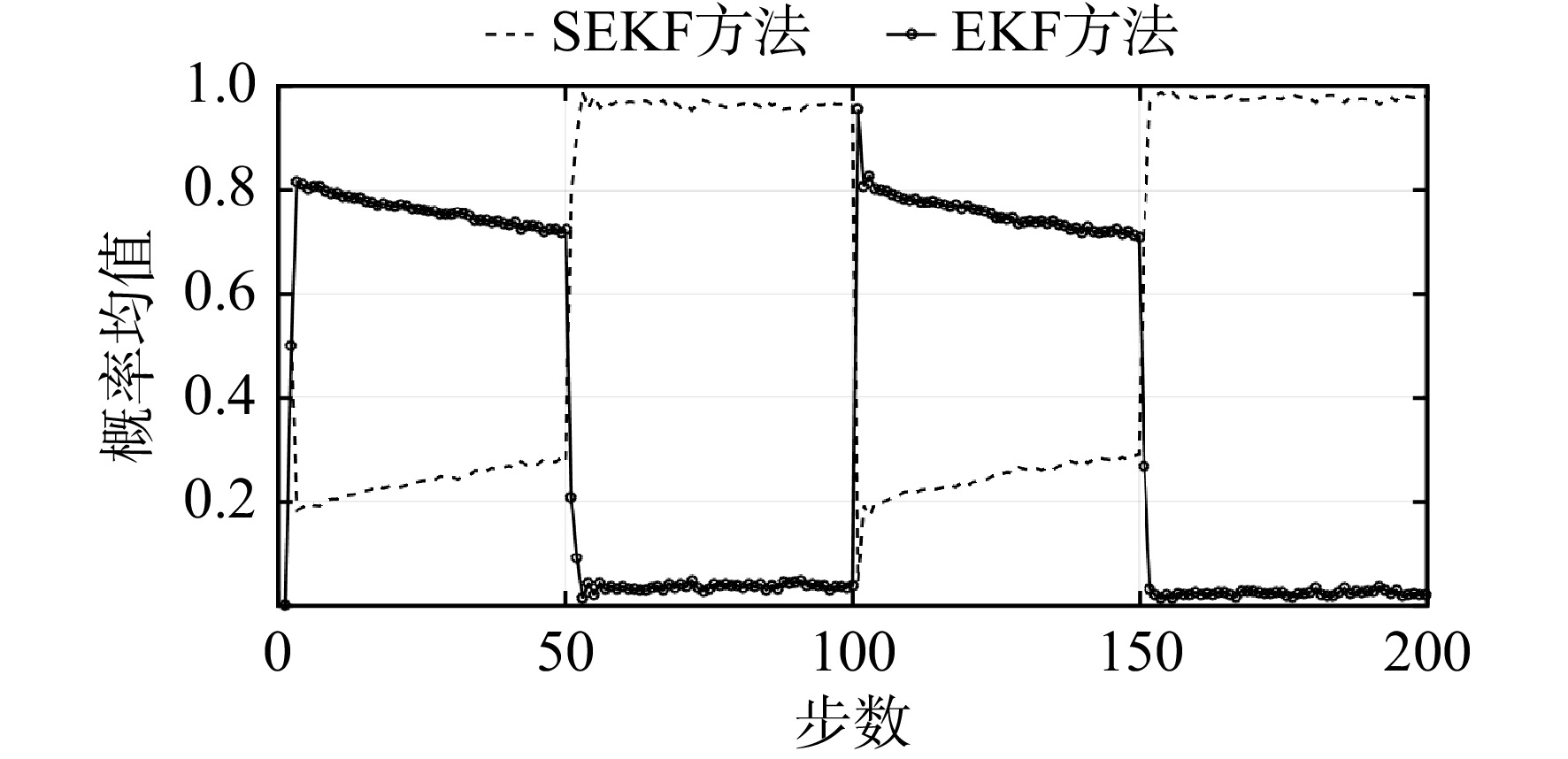
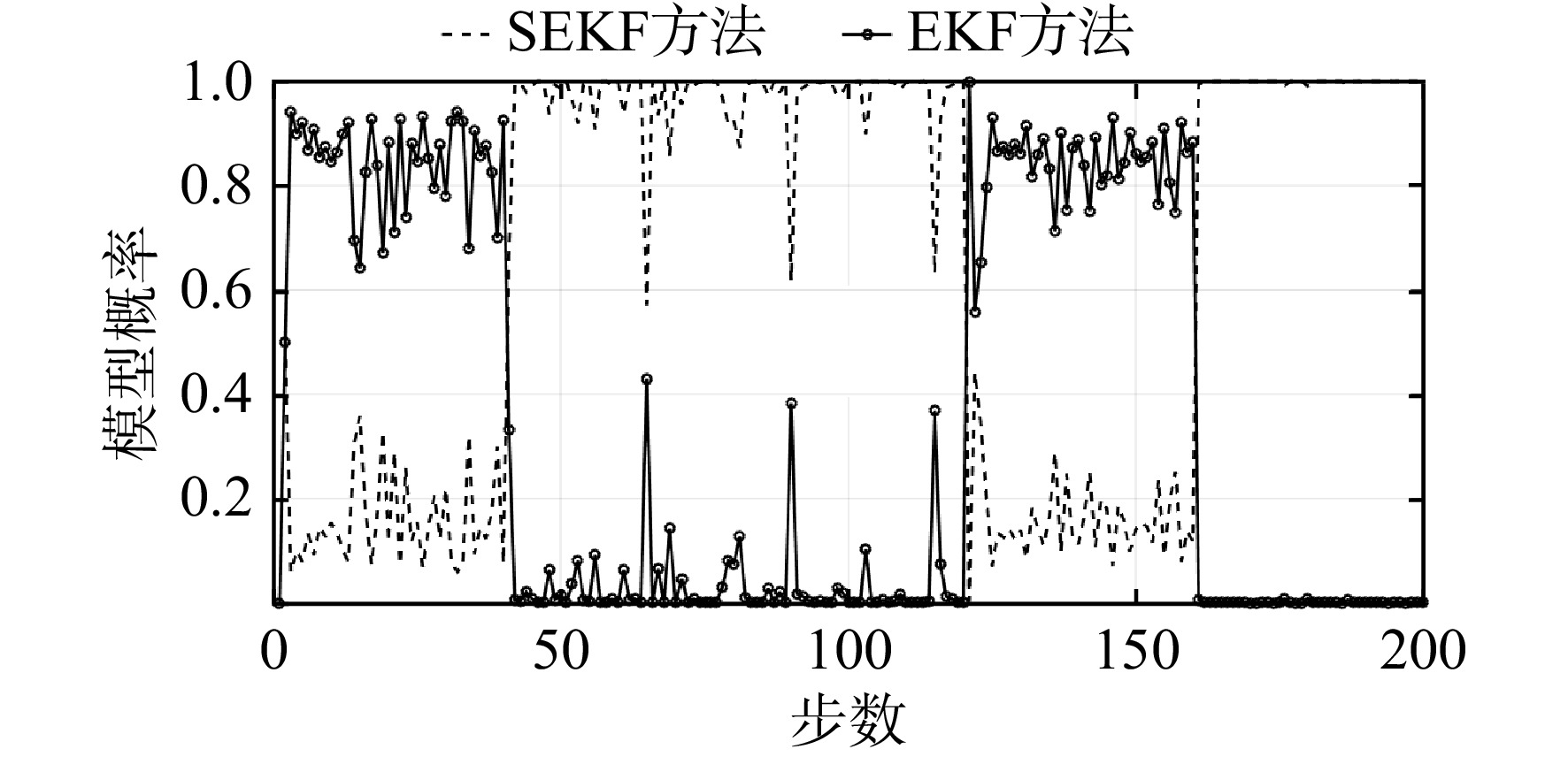
基于扩展Kalman滤波方法(EKF)、自校准扩展Kalman滤波方法(SEKF)和多模型估计理论(MME),针对工程实际中非线性系统状态方程受未知输入(如突风、故障和未知系统误差等)影响的问题,提出了一种多模型自校准扩展Kalman滤波方法(MSEKF),将多模型自校准Kalman滤波方法(MSKF)的适用范围扩展到了非线性领域。该方法同时采用EKF与SEKF进行计算,根据贝叶斯定理实时分配两者先验估计值的权重,通过加权融合进而得到最终的状态估计。本文方法不仅解决了非线性系统状态方程受未知输入影响时EKF滤波发散的问题,而且在未知输入为零时的滤波精度与SEKF相比也更高,大量数值仿真结果表明该方法精度提升可达4%,具有更强的适应性和鲁棒性。
-
关键词:
- 自校准滤波 /
- 多模型估计 /
- 扩展Kalman滤波 /
- 未知输入 /
- 故障诊断
Abstract:Based on the extended Kalman filter (EKF), the self-calibration extended Kalman filter (SEKF) and the multiple-model estimation (MME), and considering the influence of unknown inputs (such as gusts, faults, unknown system errors, etc.) on the nonlinear system state equation in Engineering, the multiple-model self-calibration extended Kalman filter (MSEKF) was proposed to expand the application scope of the multiple-model self-calibration Kalman filter (MSKF). According to the Bayes’ theorem, this filtering method used the EKF and the SEKF whose weights were assigned automatically to obtain the final filtering result through weight-average way. The MSEKF can not only effectively compensate the effects of non-zero unknown inputs on the nonlinear system, but also improve the estimation accuracy compared with the SEKF when these effects were zero. A large number of simulation results using the proposed method showed that the accuracy can be improved by more than 4%, showing stronger adaptability and robustness.
-
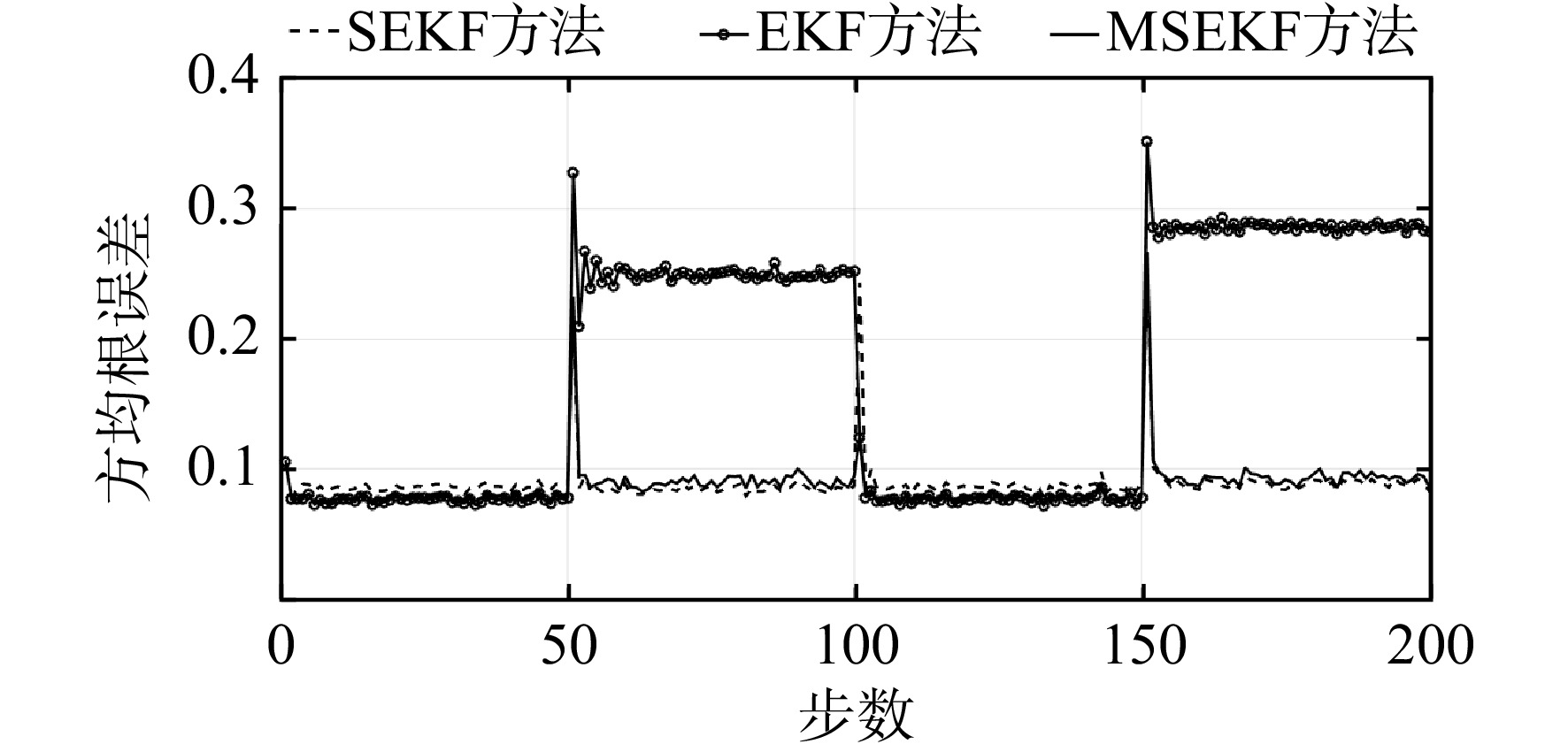
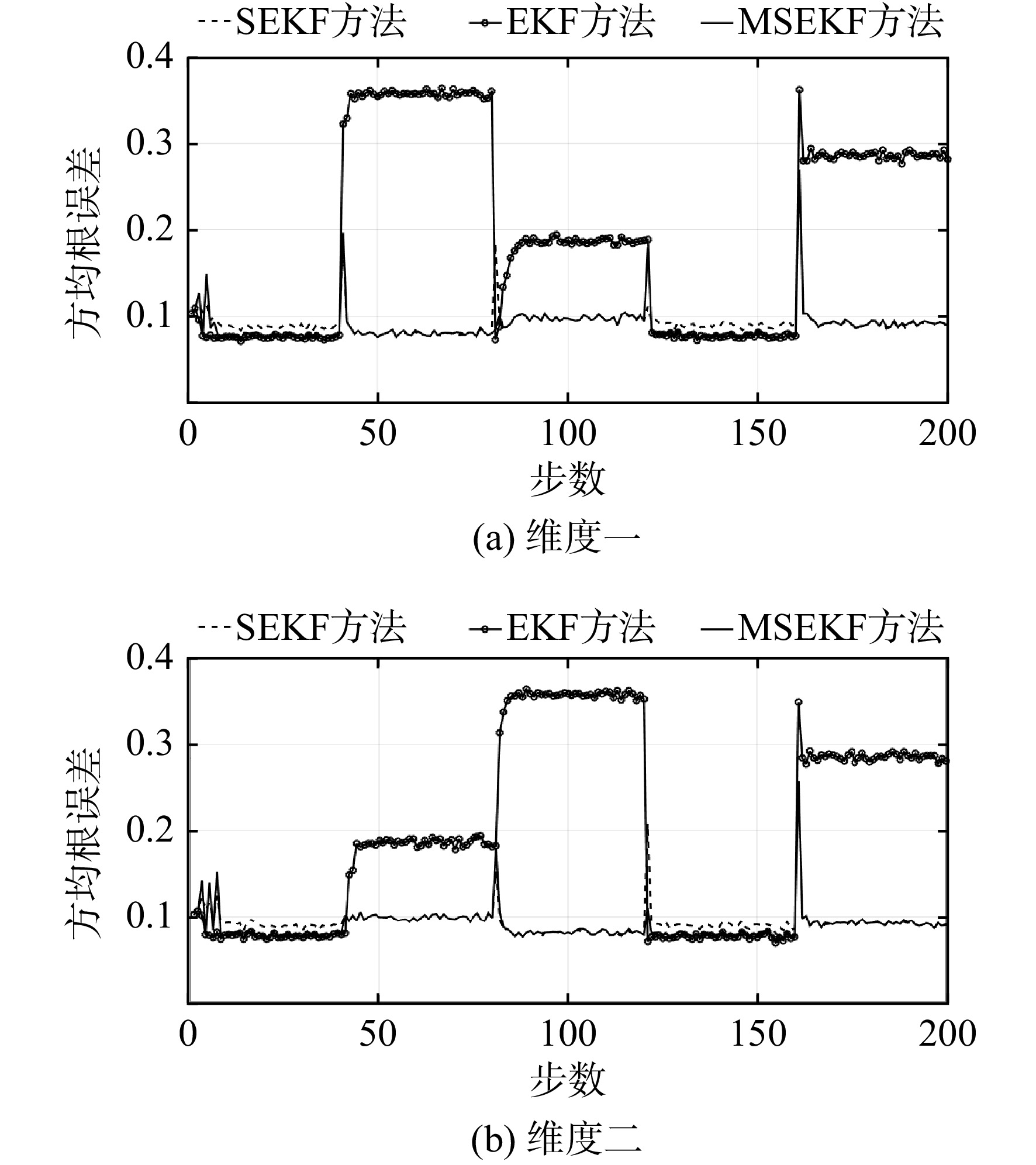
表 2 各维度方均根误差均值
Table 2. Mean of RMSEs in two dimensions
方法 方均根误差均值 维度一 维度二 MSEKF 0.0889 0.0889 SEKF 0.0923 0.0925 EKF 0.1963 0.1963  下载: 导出CSV
下载: 导出CSV
-
[1] KALMAN R E. A new approach to linear filtering and prediction problems[J]. Journal of Basic Engineering,1960,82(1): 35-45. doi: 10.1115/1.3662552 [2] SUNAHARA Y. An approximate method of state estimation for nonlinear dynamical systems[J]. Journal of Basic Engineering,1970,92(2): 385-393. doi: 10.1115/1.3425006 [3] FUJIMOTO O,OKITA Y,OZAKI S. Nonlinearity compensation Extended Kalman filter and its application to target motion[J]. Oki Technical Review,1997,63(159): 1-12. [4] JULIER S J, UHLMANN J K. A new extension of Kalman filter to nonlinear systems[C]//Proceedings of 11th International Symposium Aerospace/Defense Sensing, Simulation and Controls. Orlando, US: Society of Photo-Optical Instrumentation Engineers (SPIE), 1997: 182-193. [5] JULIER S,UHLMANN J,DURRANT-WHYTE H F. A new method for the nonlinear transformation of means and covariances in filters and estimators[J]. IEEE Transactions on Automatic Control,2000,45(3): 477-482. doi: 10.1109/9.847726 [6] JULIER S J,UHLMANN J K. Unscented filtering and nonlinear estimation[J]. Proceedings of the IEEE,2004,92(3): 401-422. doi: 10.1109/JPROC.2003.823141 [7] DAN S. Optimal state estimation: Kalman, H[infinity], and nonlinear approaches[M]. Hoboken, US: John Wiley and Sons, 2006. [8] ARASARATNAM I,HAYKIN S. Cubature Kalman filters[J]. IEEE Transactions on Automatic Control,2009,54(6): 1254-1269. doi: 10.1109/TAC.2009.2019800 [9] PITT M K,SHEPHARD N. Filtering via simulation: auxiliary particle filters[J]. Journal of the American Statistical Association,1999,94(446): 590-599. doi: 10.1080/01621459.1999.10474153 [10] 傅惠民,肖强,吴云章,等. 秩滤波方法[J]. 机械强度,2014,36(4): 521-526. doi: 10.16579/j.issn.1001.9669.2014.04.031FU Huimin,XIAO Qiang,WU Yunzhang,et al. Rank filter method[J]. Journal of Mechanical Strength,2014,36(4): 521-526. (in Chinese) doi: 10.16579/j.issn.1001.9669.2014.04.031 [11] 傅惠民,肖强,娄泰山,等. 非线性非高斯秩滤波方法[J]. 航空动力学报,2015,30(10): 2318-2322. doi: 10.13224/j.cnki.jasp.2015.10.003FU Huimin,XIAO Qiang,LOU Taishan,et al. Nonlinear and non-Guassian rank filter method[J]. Journal of Aerospace Power,2015,30(10): 2318-2322. (in Chinese) doi: 10.13224/j.cnki.jasp.2015.10.003 [12] BLANKE M, SCHRÖDER J. Diagnosis and fault-tolerant control[M]. 2nd ed. Berlin, Germany: Springer, 2006. [13] CHEN J, PATTON R. Robust model-based fault diagnosis for dynamic systems[M]. Boston, US: Kluwer Academic Publishers, 1999 [14] GILLIJNS S,DE MOOR B. Unbiased minimum-variance input and state estimation for linear discrete-time systems[J]. Automatica,2007,43(1): 111-116. doi: 10.1016/j.automatica.2006.08.002 [15] 傅惠民,吴云章,娄泰山,等. 自校准Kalman滤波方法[J]. 航空动力学报,2014,29(6): 1363-1368. doi: 10.13224/j.cnki.jasp.2014.06.015FU Huimin,WU Yunzhang,LOU Taishan,et al. Self-calibration Kalman filter method[J]. Journal of Aerospace Power,2014,29(6): 1363-1368. (in Chinese) doi: 10.13224/j.cnki.jasp.2014.06.015 [16] 傅惠民,娄泰山,肖强,等. 自校准扩展Kalman滤波方法[J]. 航空动力学报,2014,29(11): 2710-2715.FU Huimin,LOU Taishan,XIAO Qiang,et al. Self-calibration extended Kalman filter method[J]. Journal of Aerospace Power,2014,29(11): 2710-2715. (in Chinese) [17] 傅惠民,杨海峰,文歆磊. 非线性自识别自校准Kalman滤波方法[J]. 控制与信息技术,2019(5): 7-11.FU Huimin,YANG Haifeng,WEN Xinlei. A nonlinear self-recognition self-calibration Kalman filtering method[J]. Control and Information Technology,2019(5): 7-11. (in Chinese) [18] MAGILL D. Optimal adaptive estimation of sampled stochastic processes[J]. IEEE Transactions on Automatic Control,1965,10(4): 434-439. doi: 10.1109/TAC.1965.1098191 [19] XIAO Rongli. Hybrid estimation techniques[J]. Control and Dynamic Systems,1996,76: 213-287. [20] MAZOR E, AVERBUCH A, BAR-SHALOM Y, et al. Interacting multiple model methods in target tracking: a survey[J]. IEEE Transactions on Aerospace and Electronic Systems, 1998, 34(1): 103-123 [21] LI X R,BAR-SHALOM Y. Performance prediction of the interacting multiple model algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems,1993,29(3): 755-771. doi: 10.1109/7.220926 [22] DAEIPOUR E,BAR-SHALOM Y. IMM tracking of maneuvering targets in the presence of glint[J]. IEEE Transactions on Aerospace and Electronic Systems,1998,34(3): 996-1003. doi: 10.1109/7.705913 -


 点击查看大图
点击查看大图

计量
- 文章访问数: 64
- HTML浏览量: 18
- PDF量: 18
- 被引次数: 0