摘要:
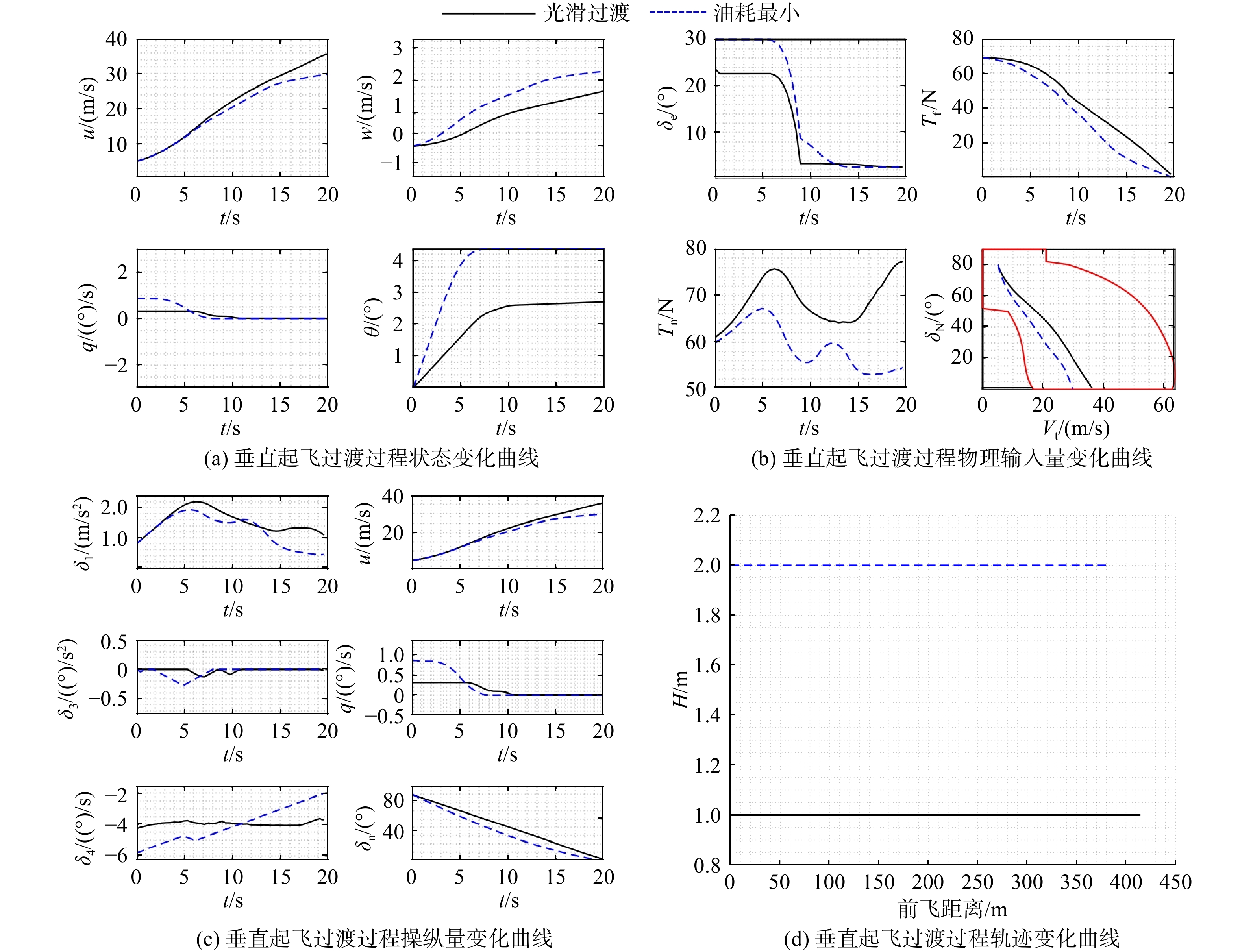
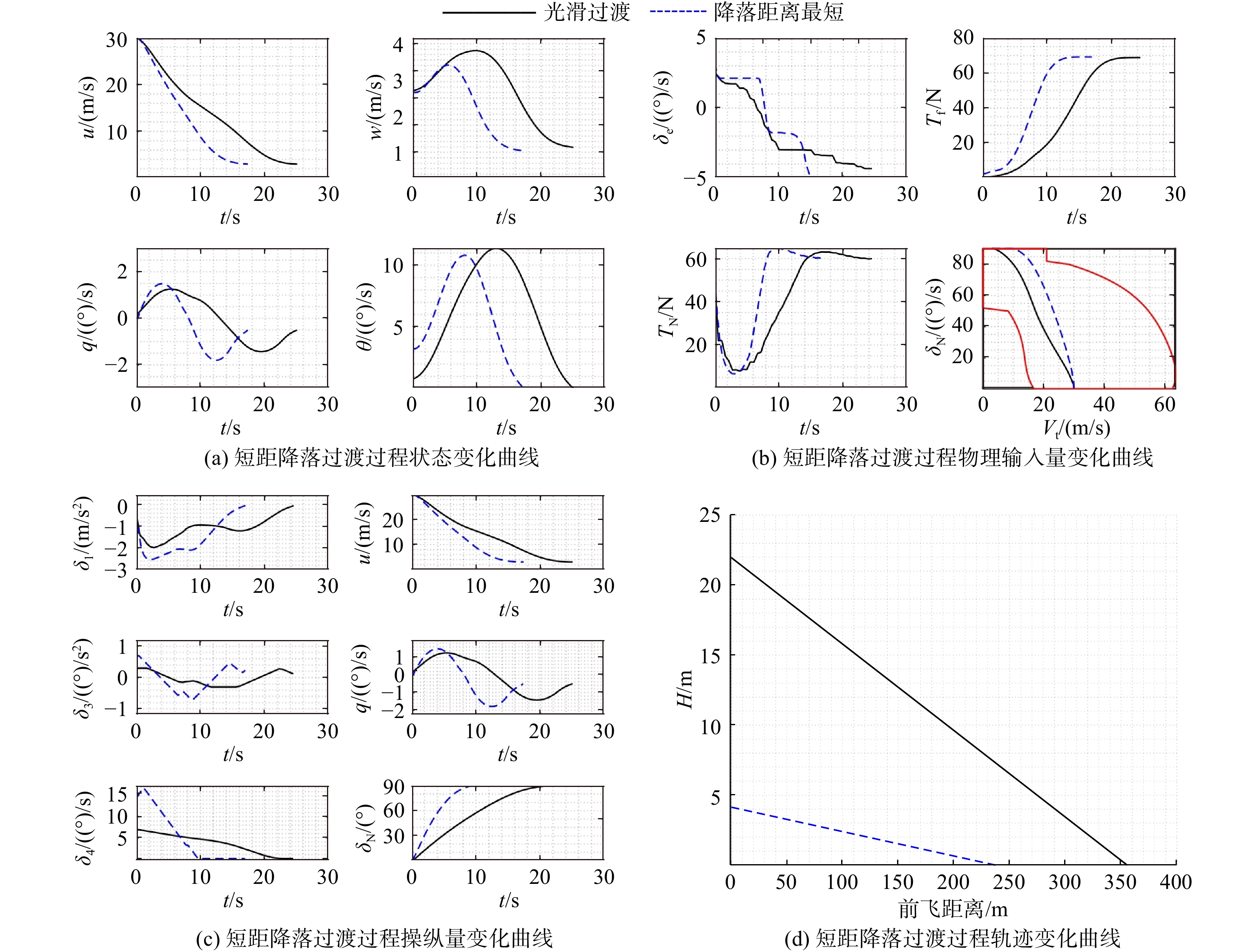
针对推力矢量型垂直/短距起降(vertical/short takeoff and landing, V/STOL)飞行器的动态过渡过程模型,综合考虑过渡走廊限制、操纵冗余及不同起降任务需求指标,研究最优过渡操纵策略。考虑V/STOL 飞行器的喷射气流效应,对飞行器进行全量动力学建模。利用可达平衡集方法,建立通用过渡走廊计算框架。设计了能够在V/STOL过渡段和高速飞行间平稳过渡的操纵方式。将推力矢量飞行器的动态倾转过渡过程转化为非线性动态最优控制问题,根据不同起降任务特点建立合理的指标和约束,采用直接转换法和序列二次规划算法进行求解,得出不同任务特点下的最优操纵策略与过渡过程。采用可达平衡集计算过渡走廊的方法,不仅不受飞行器类型的限制,更简化了构造过程,具有良好的通用性与鲁棒性。以光滑过渡为目标的优化结果使得飞行员在飞行器过渡过程中的操纵量变化大幅减小,从而使得飞行员能更加专注于对飞行器运动的操纵;以距离更短为目标的优化结果则使得降落过程的飞行距离缩短了30%左右。从操纵策略出发的优化结果使得驾驶员能够更好掌握操纵关注点及边界,增加了整个动态过渡过程的安全性。
周涛, 王子安, 龚正, 等. 推力矢量型V/STOL飞行器动态过渡过程的操纵策略优化[J]. 航空动力学报, 2023, 38(2):408-419. doi: 10.13224/j.cnki.jasp.20210412.